KUNJ GOLWALA
Robotics Engineer and AI Enthusiast
About Me
I am a graduate robotics student passionate about building intelligent robotic systems. Currently, I am pursuing my Master's in Robotics Engineering at the University of Maryland, College Park, where I am developing expertise in autonomous systems, computer vision, and AI.
My academic foundation includes a Bachelor's degree in Mechanical Engineering with a minor in Robotics from IIT Jodhpur. During my time there, I worked on several challenging projects, including object detection using LiDAR, reinforcement learning for robotic gait control, and human-following robots.
I have gained valuable industry experience through internships at Symbotic LLC as a Perception Software Engineer, working on autonomous mobile robots for warehouse automation, and as a MITACS Globalink Research Intern at the University of Alberta, focusing on multi-agent reinforcement learning for autonomous vehicles.
Beyond software, I am also passionate about robot design and have a strong proficiency in SolidWorks. My technical skills span Python, C++, ROS 2, TensorFlow, and OpenCV. I am particularly interested in designing robotic systems, building software for robots, exploring advanced computer vision techniques, and path planning.
Key Focus Areas
Experience
Research Assistant
GAMMA Lab
College Park, Maryland
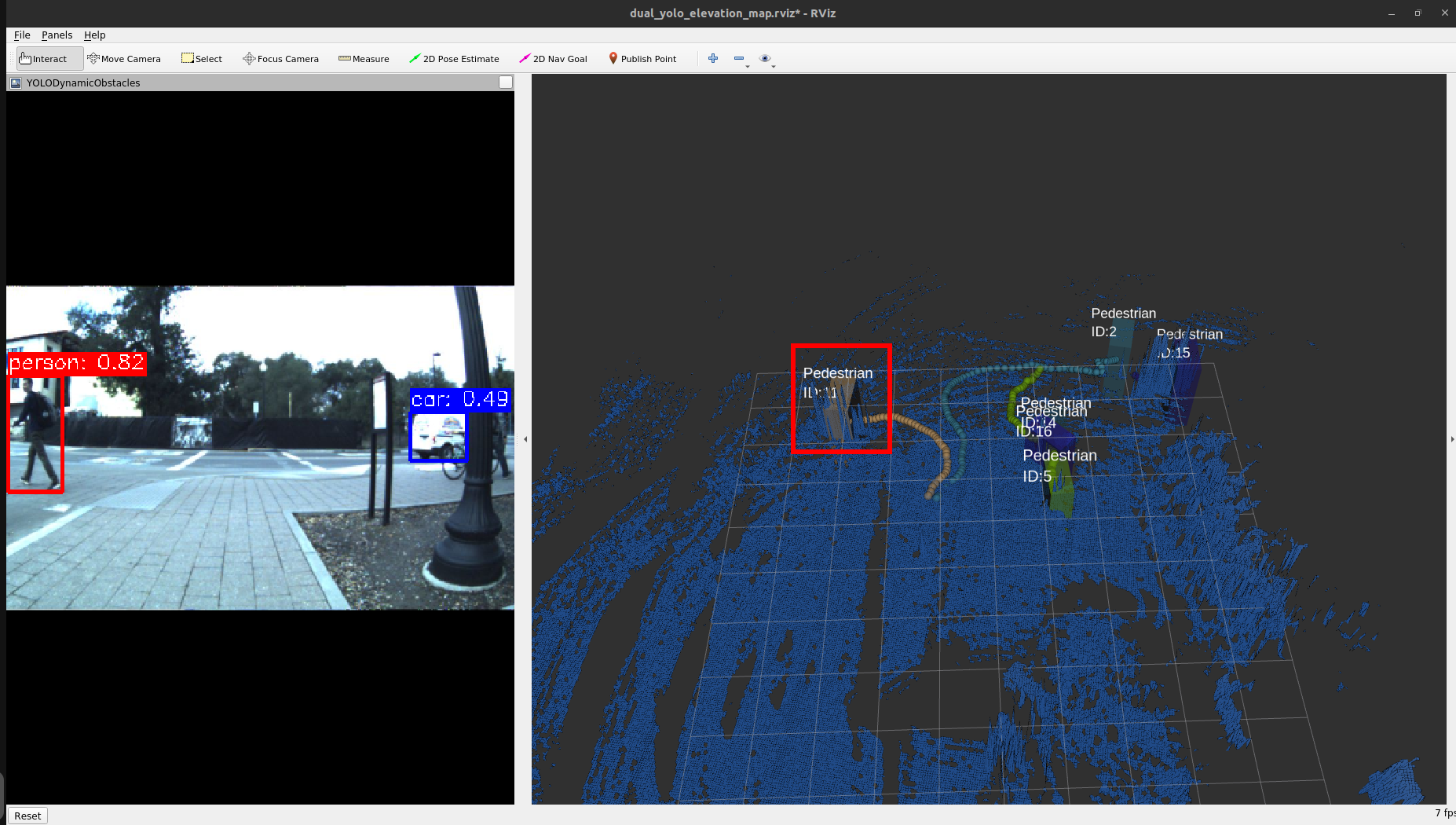
Traffic Navigation for Curbside Robots
- •Developed perception system (3D tracking and detection) using cameras, Lidar for scene understanding.
- •Engineered a novel approach by combining fine tuned YOLO, cany edge detector and hough line transform for crosswalk detection with correct 3D position and yaw orientation
- •Curated a behavior tree for navigation and trajectory planning using MPPI Planner and SLAM, enabling safe interaction with vehicles and pedestrians at crosswalks and stop signs with ROS 2, C++ and Python.
Perception Software Engineer
Symbotic LLC (NASDAQ: SYM)
Boston, Massachusetts
I was part of the Perception - Case Estimation team, working on developing advanced computer vision solutions for autonomous mobile robots in large-scale warehouse environments.
- •Developed a Transformer based vision model for Case Re-identification using onboard stereo camera on AMRs, capable of detecting different 20,000 unique SKUs in varied and partially occluded poses in large scale warehouse.
- •Containerized Case ID detection node using ROS 2 and Docker for deployment on the AMR edge computer - NVIDIA Jetson Xavier by converting to TensorRT model.
- •Reduced inference time and latency between nodes by 70% using multi-threading and embedding vector caching.
- •Automated data collection pipeline and syncing temporal data from onboard IMU and 8 RGB cameras.


Computer Vision Graduate Research Assistant
Bio-Imaging and Machine Vision (BMV) Lab
College Park, Maryland
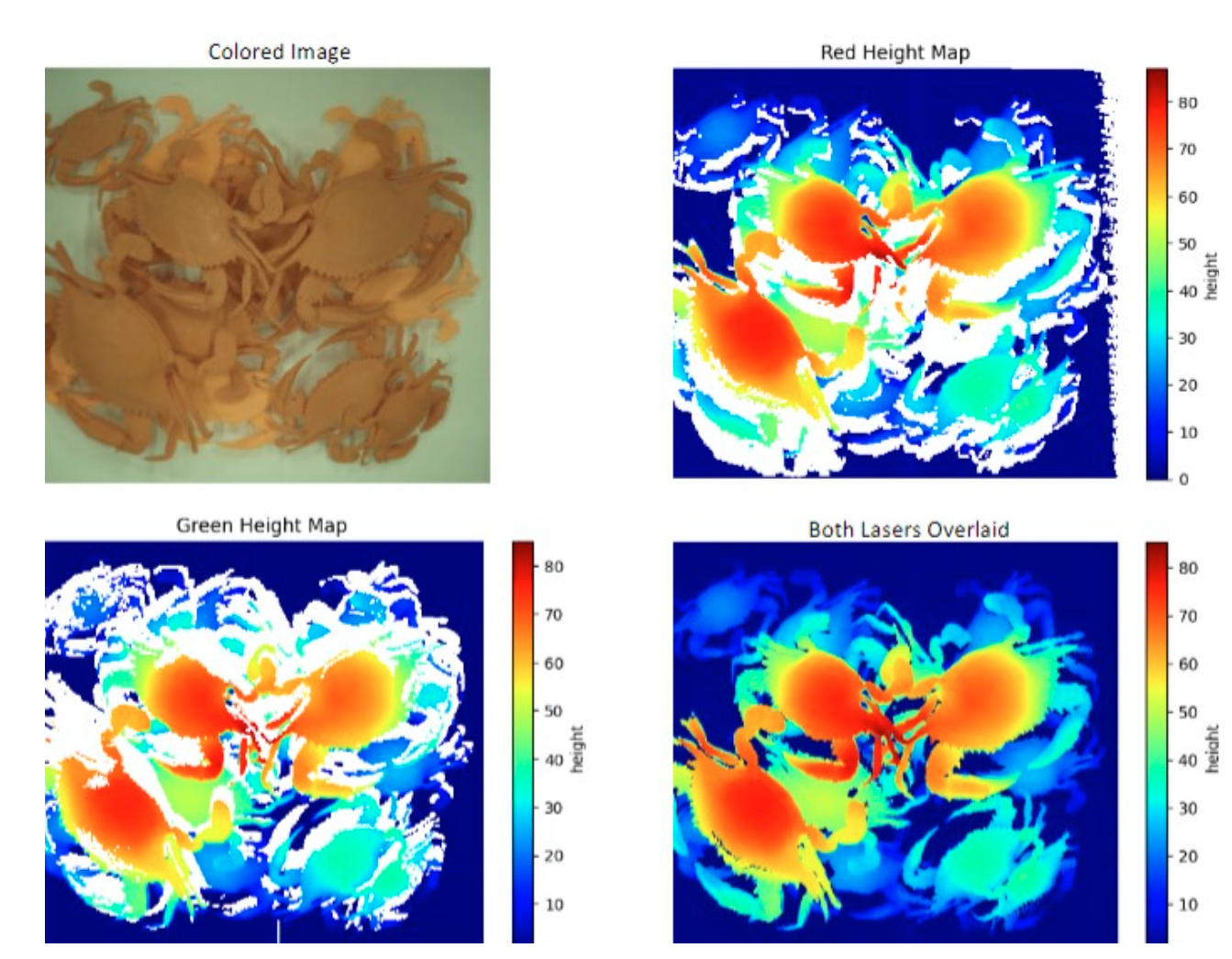
Crab Detection Robotics System - Worked on developing computer vision and robotics solutions for automated detection and manipulation systems.
- •Engineered real-time computer vision pipeline using ROS and OpenCV, achieving 75% reduction in manual intervention.
- •Developed dual-backbone neural networks (Masked CNN + Vision Transformer) for segmentation and keypoint detection, improving accuracy by 40%.
- •Developed hybrid depth estimation system combining single beam dual laser scanning and monocular depth estimation, achieving 87% accuracy for 3D environment mapping
- •Implemented imitation learning with Adaptive Compliance Policy using multi-modal sensor fusion, achieving 30% improvement in robotic arm precision.
- •Designed modular software architecture enabling seamless integration of perception, planning, and control modules.

MITACS Globalink Research Intern
University of Alberta
Edmonton, Canada
Multi-Agent Reinforcement Learning for Autonomous Vehicle - Conducted research on autonomous vehicle systems using advanced reinforcement learning techniques.
- •Implemented Multi-Agent Reinforcement Learning (MARL) for high-density vehicle merging scenarios, improving response times by 30% in dynamic traffic.
- •Developed a priority-based safety supervisor, achieving a 40% reduction in collision rates during training.
- •Applied curriculum learning, boosting convergence speed by 25% by gradually increasing task complexity.
- •Simulated the RL model with custom made OpenAI gym environment in Python using TensorFlow.
Featured Projects
Deep Reinforcement Learning for Autonomous Parking
- Simulated autonomous car parking in CARLA Simulator using DDPG and PPO algorithms with 90% success rate.
- Leveraged CNN-based Variational Autoencoder (VAE) for feature extraction and designed optimized reward functions with unique penalty terms.
Safe and Optimal Path Planning for F1 Track
- Implemented LQR, CBF and RRT* for generating dynamically feasible and collision-free paths for an F1 track.
- Performed grid search optimization and simulated on Turtlebot in Gazebo environment.
TMI (Too Much Info) - OpenVLA Fine tuning
- Generated action tokens with behavior cloning using camera data as observation and input prompt as conditioning.
- Developed an automated pipeline for OpenVLA on LIBERO Mujoco simulator, demonstrating the impact of NLP perturbations.
- Engineered a hybrid framework using LoRA fine-tuning and LLM filtering, improving manipulation task and action success rates by 35% on noisy instruction sets for 4 DOF robotic arm.
Vision Based Intelligence - Real Time Autonomous Navigation for AMR
- Engineered computer vision system for TurtleBot4 autonomous navigation achieving 95% accuracy.
- Implemented ArUco marker navigation with real-time camera calibration.
- Developed projective geometry algorithms using Canny edge detection and RANSAC for horizon computation.
- Built YOLO-based stop sign detector with 98% accuracy.
- Engineered optical flow obstacle detection using Lucas-Kanade tracking.
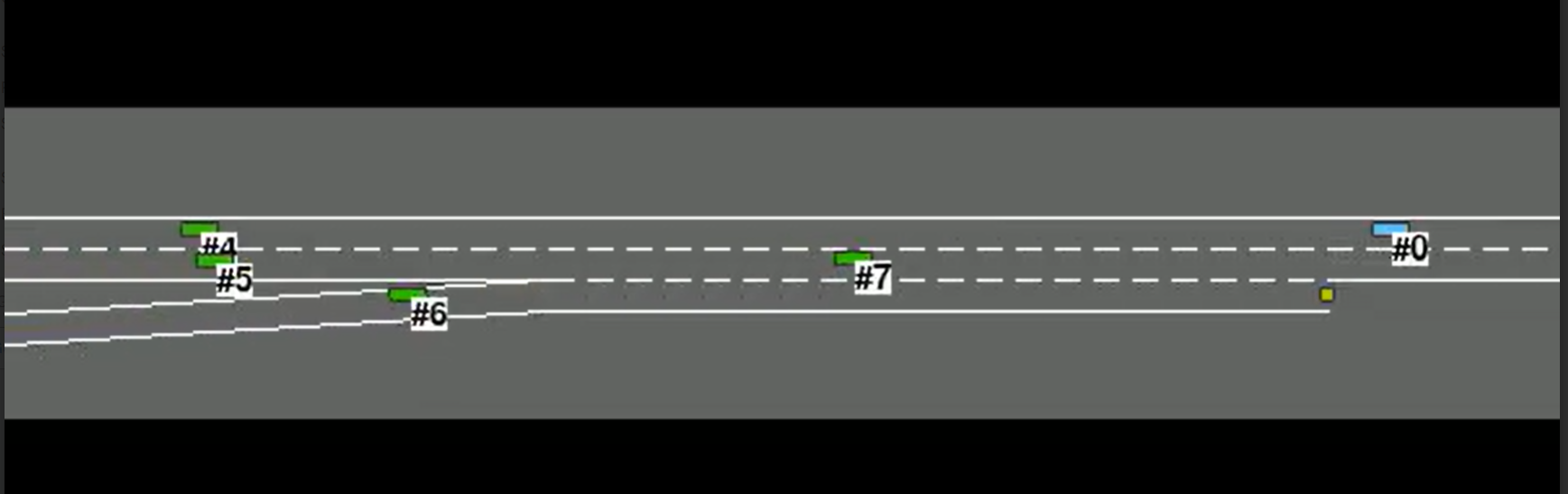
Frenet Optimal Trajectory Planner for ADAS
- Implemented a Frenet based optimal trajectory planner integrated with a behavioral planner, generating smooth and collision free trajectories for lane keeping, lane changes, and vehicle following in CARLA Simulator.
- Implemented Frenet coordinate trajectory planning, generating smooth collision-free trajectories using quintic and quartic polynomials with jerk minimization.
- Designed and optimized cost function for trajectory selection incorporating jerk cost, time cost, lateral deviation, and speed deviation metrics to select optimal trajectories.
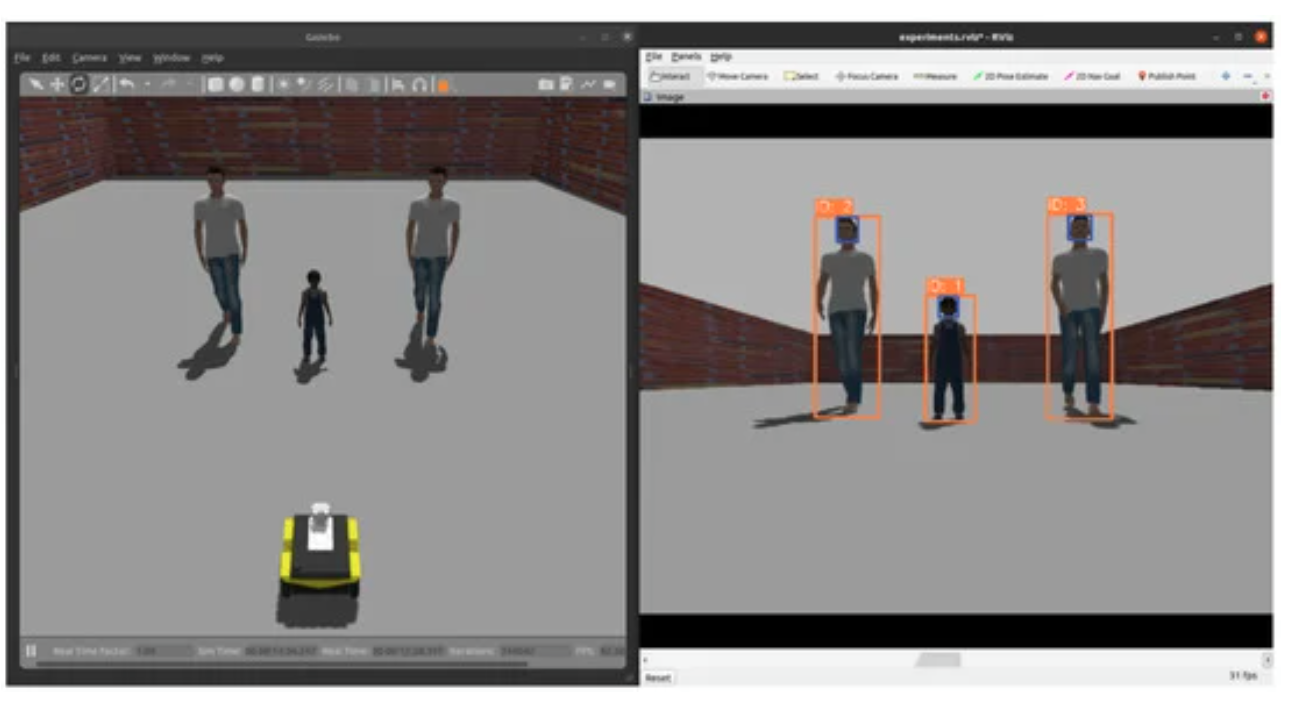
AI-Powered Human-Following Robot
- Deployed camera tracking with ROS 2 on industrial AMR, with 80% accuracy by fine-tuning for human detection.
- Integrated ORB SLAM for Lidar navigation and potential field controller for obstacle avoidance using C++.
- Implemented point to plane ICP using PCL for scan matching, combined with optimizations of PCA, Kd tree.
JLR Autonomous EV Charging Robotic Manipulator
- Led a team of 8 to design and develop an autonomous EV charging station using a custom-designed robotic arm.
- Simulated robotic arm movements using inverse kinematics and Jacobian Control in MATLAB.
Teleoperation of Robot Swarms
- Developed a ROS2 pipeline in Python for the teleoperation of robot swarms for flocking problem.
- Implemented Iterative Closest Point (ICP) using PCL Library in Python for structural depth estimation.
- Implemented a single integrator, distributed control model with undirected interaction topology.
Research & Publications

Alleviation of Viscoelastic Creep in Electrostatically Driven Soft Dielectric Elastomer Actuators Using Input Shaping Scheme
20th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA)
Presented research on alleviating viscoelastic creep in electrostatically driven soft dielectric elastomer actuators using input shaping scheme at the IEEE/ASME MESA conference in Genova, Italy.
- •Developed input shaping scheme to reduce viscoelastic creep in dielectric elastomer actuators.
- •Presented research at prestigious IEEE/ASME MESA conference in Genova, Italy.
- •Improved actuator performance and reliability through innovative control techniques.

A polyester-stainless steel based smart wristband sensor for skin temperature monitoring
The Journal of The Textile Institute
Developed a smart wristband sensor using polyester-stainless steel materials for continuous skin temperature monitoring with enhanced comfort and accuracy.
- •Designed and fabricated a novel smart wristband sensor using polyester-stainless steel composite materials.
- •Implemented continuous skin temperature monitoring with improved comfort and accuracy for wearable applications.
Towards High Efficiency and Rapid Production of Room-Temperature Liquid Metal Wires Compatible with Electronic Prototyping Connectors
Micromachines Journal
Contributed to research on developing high-efficiency methods for producing room-temperature liquid metal wires that are compatible with standard electronic prototyping connectors.
- •Collaborated on developing rapid production methods for room-temperature liquid metal wires.
- •Ensured compatibility with standard electronic prototyping connectors for practical applications.
Skills & Technologies
Programming Languages
Python
C++
MATLAB
R
TypeScript
Machine Learning & Robotics
Reinforcement Learning
Imitation Learning
Deep Neural Networks
Robotics Frameworks & Tools
ROS
OpenAI Gym
Gazebo
PyBullet
MuJoCo
OpenCV
TensorFlow
PyTorch
Software Development
Object-Oriented Programming
Git
React
CI/CD - Travis
Docker
Jenkins
Kubernetes
Coursework
Robotics Courses
- •Robot Modeling
- •Control of Robotics Systems
- •Perception of Autonomous Systems
- •Planning for Autonomous Systems
- •Mobile Robots
- •Autonomous Systems
- •Robot Learning
Computer Science Courses
- •Robot Programming
- •Introduction to Computer Science
- •Introduction to Machine Learning
- •Data Structures and Algorithms
- •Scientific Computations
- •Computer Vision
- •Deep Learning
MOOCs
- •Machine Learning (Stanford University)
- •ROS: Localization, Navigation and SLAM (Anis Koubaa)
- •Aerial Robotics (University of Pennsylvania)
- •A Hands-On Introduction to Engineering Simulations (Cornell)
Let's Connect
Have a project in mind? Let's create something amazing together.